
幼女でもわかる単相PWMコンバータのベクトル制御
前回の記事で紹介した単相PWMコンバータについて,その制御系に関して少し詳しく解説します.

この単相PWMコンバータは電流制御方法として仮想軸電流ベクトル制御というものを使っています.
(この名称は仮想的な二軸電流に対してベクトル制御をするということで,私が勝手に命名したものです.)
ベクトル制御とは,多相交流において元々の座標系(固定座標系)上での電流ベクトルに座標変換(dq変換)を適用し,回転座標系あるいはdq座標系と呼ばれる直交座標系上のベクトルとして電流を制御することを一般的にいいます.dq座標系は,回転する基準のベクトルに対する,大きさと位相の情報を持つ2本の直流として表されます.つまり,dq座標系では,交流をあたかも直流のように扱うことができるということです.回転する基準のベクトルとは基本的に,誘導モータでは二次磁束,同期モータでは界磁磁束,そして系統連系インバータやPWMコンバータでは電源電圧が選ばれます.その位相角を用い,電流ベクトルを基準ベクトルの回転とは反対方向に回転変換することで,dq座標系における直流,すなわちd軸電流とq軸電流が取得されます.d軸電流は基準ベクトルの位相と一致した方向の成分で,モータでは回転子磁束,系統連系では有効電力に寄与します.また,q軸電流はd軸に直行する成分であり,モータではトルク,系統連系では無効電力に寄与します.すなわち,2本それぞれの電流を操作することにより,それぞれに寄与する量を独立的に制御できるということになります.
通常のベクトル制御は三相の電力変換器において適用されます.二相以上の交流でないと二次元のベクトル量として表されないので,
ここでは,単相に対して演算によりもう一つの相を補うことで二相とし,単相電源でもベクトル制御が可能となるPWMコンバータ制御系の構成方法を紹介します.単相PWMコンバータにベクトル制御を適用することで,電流の追従性が向上し,また無効電力の調整が容易にできるようになります.まずは一般的なPWMコンバータのベクトル制御を考えるため,dq座標系上のプラントのモデル化と,ベクトル制御を適用するための電流制御系の構成方法を解説します.その後に,単相のPWMコンバータにベクトル制御を適用するための,二次一般化積分器ベース位相同期ループ(SOGI-based PLL)と仮想軸エミュレーション(FAE)について解説します.
記号の定義
$$\boldsymbol{e}_{\alpha\beta}=\left[\begin{array}{cc}e_\alpha & e_\beta \end{array} \right]^T$$$$\boldsymbol{v}_{\alpha\beta}=\left[\begin{array}{cc}v_\alpha & v_\beta \end{array} \right]^T$$$$\boldsymbol{i}_{\alpha\beta}=\left[\begin{array}{cc}i_\alpha & i_\beta \end{array} \right]^T$$$$\boldsymbol{e}_{dq}=\left[\begin{array}{cc}e_d & e_q \end{array} \right]^T$$$$\boldsymbol{v}_{dq}=\left[\begin{array}{cc}v_d & v_q \end{array} \right]^T$$$$\boldsymbol{i}_{dq}=\left[\begin{array}{cc}i_d & i_q \end{array} \right]^T$$$$\boldsymbol{I}=\left[\begin{array}{cc}1 & 0 \\ 0 & 1\end{array}\right]$$$$\boldsymbol{J}=\left[\begin{array}{cc}0 & -1 \\ 1 & 0\end{array}\right]$$$$\boldsymbol{R}(\theta)=\left[\begin{array}{cc}\cos{\theta} & -\sin{\theta} \\ \sin{\theta} & \cos{\theta}\end{array}\right]$$
PWMコンバータのdq座標モデル
二相交流を電源とするPWMコンバータを考え,その電流制御系のプラントをモデル化します.
図1に示すような,リアクトルのインダクタンスを


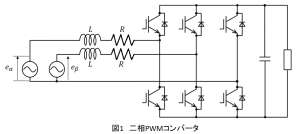
状態平均化法より,コンバータのアーム間電圧は連続的に変化する交流電圧源とみなすことができます.それを

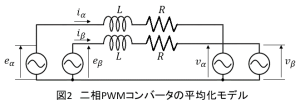
$$\boldsymbol{e}_{\alpha\beta}=L \frac{d \boldsymbol{i}_{\alpha\beta}}{dt}+ R \boldsymbol{i}_{\alpha\beta}+ \boldsymbol{v}_{\alpha\beta}\tag{1}$$
ここで,回転行列


$$\boldsymbol{f}_{dq}=\boldsymbol{R}^T(\theta)\boldsymbol{f}_{\alpha\beta}\tag{2}$$
また,dq座標系から固定座標系への逆変換は(3)式となります.
$$\boldsymbol{f}_{\alpha\beta}=\boldsymbol{R}(\theta)\boldsymbol{f}_{dq}\tag{3}$$
,,のdq座標系への写像により得られるベクトルをそれぞれ ,
, ,
, とし,(1)式の電圧方程式に対しdq変換を適用します.(3)式より(1)式の各ベクトルを置き換えると(4)式となります.
とし,(1)式の電圧方程式に対しdq変換を適用します.(3)式より(1)式の各ベクトルを置き換えると(4)式となります.
$$\boldsymbol{R}(\theta)\boldsymbol{e}_{dq}=L \frac{d}{dt}\{\boldsymbol{R}(\theta)\boldsymbol{i}_{dq}\}+ R \boldsymbol{R}(\theta)\boldsymbol{i}_{dq}+\boldsymbol{R}(\theta) \boldsymbol{v}_{dq}\tag{4}$$
両辺に左から
$$\boldsymbol{e}_{dq}=L \boldsymbol{R}^T(\theta)\frac{d}{dt}\{\boldsymbol{R}(\theta)\boldsymbol{i}_{dq}\}+ R\boldsymbol{i}_{dq}+ \boldsymbol{v}_{dq}\tag{5}$$
 とし,(5)式を計算していくと(6)式のようになります.
とし,(5)式を計算していくと(6)式のようになります.
$$\begin{align}\boldsymbol{e}_{dq} &= L \boldsymbol{R}^T(\omega t)\frac{d}{dt}\{\boldsymbol{R}(\omega t)\boldsymbol{i}_{dq}\}+ R\boldsymbol{i}_{dq}+ \boldsymbol{v}_{dq} \\ &= L \boldsymbol{R}^T(\omega t)\left\{\boldsymbol{R}(\omega t) \frac{d\boldsymbol{i}_{dq}}{dt} + \frac{d}{dt} \boldsymbol{R}(\omega t)\boldsymbol{i}_{dq}\right\}+ R\boldsymbol{i}_{dq}+ \boldsymbol{v}_{dq} \\ &= L\left\{\frac{d\boldsymbol{i}_{dq}}{dt}+\left[\begin{array}{cc}\cos{\omega t} & \sin{\omega t} \\ -\sin{\omega t} & \cos{\omega t}\end{array}\right]\cdot \omega \left[\begin{array}{cc}-\sin{\omega t} & -\cos{\omega t} \\ \cos{\omega t} & -\sin{\omega t}\end{array}\right] \boldsymbol{i}_{dq}\right\}+R\boldsymbol{i}_{dq}+\boldsymbol{v}_{dq} \\ &= L\left(\frac{d\boldsymbol{i}_{dq}}{dt}+\omega \boldsymbol{J}\boldsymbol{i}_{dq}\right)+R\boldsymbol{i}_{dq}+\boldsymbol{v}_{dq}\end{align} \tag{6}$$
(6)式より,(7)式のように
$$\frac{d\boldsymbol{i}_{dq}}{dt}=-\left(\frac{R}{L}\boldsymbol{I}+\omega\boldsymbol{J}\right)\boldsymbol{i}_{dq}-\frac{1}{L}\boldsymbol{v}_{dq}+\frac{1}{L}\boldsymbol{e}_{dq}\tag{7}$$
電源電圧は外乱であるため![\boldsymbol{e}_{dq}=\left[\begin{array}{cc}0 & 0 \end{array} \right]^T](https://s0.wp.com/latex.php?latex=%5Cboldsymbol%7Be%7D_%7Bdq%7D%3D%5Cleft%5B%5Cbegin%7Barray%7D%7Bcc%7D0+%26+0+%5Cend%7Barray%7D+%5Cright%5D%5ET&bg=ffffff&fg=000&s=0&c=20201002)


$$\begin{align}\boldsymbol{P}(s)&=-\frac{1}{L}\left\{\left(s+\frac{R}{L}\right)\boldsymbol{I}+\omega \boldsymbol{J}\right\}^{-1} \\ &= -\frac{1}{L}\left[\begin{array}{cc} s+\frac{R}{L} & -\omega \\ \omega & s+\frac{R}{L} \end{array}\right]^{-1}\end{align}\tag{8}$$
また,(8)式の伝達関数行列の逆行列より,入出力の関係を反転させると(9)式となります.
$$\begin{align}\boldsymbol{P}^{-1}(s)&= -L\left[\begin{array}{cc} s+\frac{R}{L} & -\omega \\ \omega & s+\frac{R}{L} \end{array}\right] \\ &= -\left[\begin{array}{cc} Ls+R & -\omega L \\ \omega L & Ls+R \end{array}\right]\end{align}\tag{9}$$
(9)式をブロック線図で表現すると図3のように表されます.ただし,信号の流れは右側から左側に向かうものとして表しています.
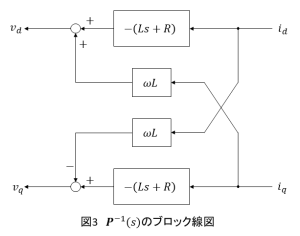
図3のブロック線図より,改めて入出力の関係をもとに戻すように変形させると,図4のブロック線図となります.
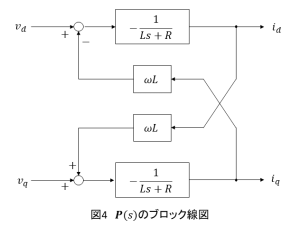
また,電源電圧

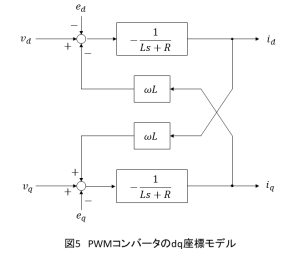
電流制御系の構成
図5のようにモデル化されたdq座標系上のPWMコンバータに対して,
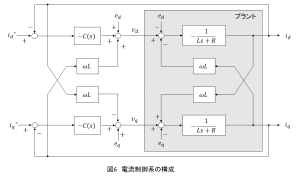
これは,図7と等価になります.このように,それぞれの干渉を無くし,各軸で独立した制御系として扱うことができます.この制御手法は非干渉制御と呼ばれます.ベクトル制御を構成する上で必須ではありませんが,一方の軸電流の指令値を急変させた際の,もう一方の軸電流の変動を抑制することができます.
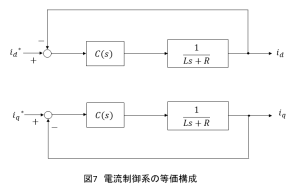
d軸とq軸は全く同じ系(非突極性)ですので,それぞれの軸の電流制御器も同じパラメータで設計すればよいことになります.電流制御器
$$\begin{align}C(s)&=K_p\left(1+\frac{1}{T_is}\right) \\ &=\omega_c L\left(1+\frac{R}{Ls}\right)\end{align}\tag{10}$$
クロスオーバ角周波数を
二次一般化積分器ベース位相同期ループ
以前の記事でも紹介したように,位相同期ループ(PLL)は電源電圧の正弦波信号からその位相角と角周波数を得ることができるものです.二次一般化積分器ベースPLL(SOGI-based PLL)では,それらに加え電源電圧に対し位相が90°遅れた信号と,電源電圧をdq変換し直流とした信号も得ることができます.つまり,単相の電源電圧を

まず,SOGI部分の構成について考えてみます.
二相の電源電圧
$$\boldsymbol{e}_{\alpha\beta}=E_m\left[\begin{array}{c}\cos{\omega t} \\ \sin{\omega t}\end{array}\right]\tag{11}$$
これを微分すると(12)式となります.
$$\begin{align}\frac{d\boldsymbol{e}_{\alpha\beta}}{dt} &= E_m\omega \left[\begin{array}{c} -\sin{\omega t} \\ \cos{\omega t}\end{array}\right] \\ &=E_m\omega \boldsymbol{J}\left[\begin{array}{c} \cos{\omega t} \\ \sin{\omega t}\end{array}\right]\end{align}\tag{12}$$
したがって,(13)式のような状態方程式が成り立ちます.
$$\frac{d\boldsymbol{e}_{\alpha\beta}}{dt} = \omega \boldsymbol{J}\boldsymbol{e}_{\alpha\beta}\tag{13}$$
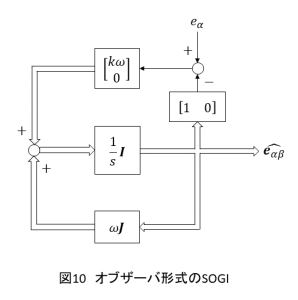
(13)式より,
$$\frac{d\hat{\boldsymbol{e}_{\alpha\beta}}}{dt} = \omega \boldsymbol{J}\hat{\boldsymbol{e}_{\alpha\beta}}+\boldsymbol{l}(e_\alpha-\left[\begin{array}{cc} 1 & 0 \end{array} \right]\hat{\boldsymbol{e}_{\alpha\beta}})\tag{14}$$
これにより,
オブザーバゲインを![\boldsymbol{l}=\left[\begin{array}{cc}k\omega & 0 \end{array} \right]^T](https://s0.wp.com/latex.php?latex=%5Cboldsymbol%7Bl%7D%3D%5Cleft%5B%5Cbegin%7Barray%7D%7Bcc%7Dk%5Comega+%26+0+%5Cend%7Barray%7D+%5Cright%5D%5ET&bg=ffffff&fg=000&s=0&c=20201002)
$$\begin{align}\frac{d\hat{\boldsymbol{e}_{\alpha\beta}}}{dt} &= \omega \boldsymbol{J} \hat{\boldsymbol{e}_{\alpha\beta}} + \left[\begin{array}{c} k \omega \\ 0 \end{array}\right] (e_\alpha-\left[\begin{array}{cc} 1 & 0 \end{array} \right]\hat{\boldsymbol{e}_{\alpha\beta}}) \\ &= \left[\begin{array}{cc} -k \omega & -\omega \\ \omega & 0 \end{array}\right] \hat{\boldsymbol{e}_{\alpha\beta}}+\left[\begin{array}{c} k\omega \\ 0 \end{array}\right] e_{\alpha} \end{align}\tag{15}$$
(15)式より,伝達関数を(16)式のように求めます.
$$\begin{align}\frac{\hat{\boldsymbol{e}_{\alpha\beta}}(s)}{e_\alpha(s)}&= \left(s\boldsymbol{I}-\left[\begin{array}{cc} -k \omega & -\omega \\ \omega & 0 \end{array}\right]\right)^{-1}\left[\begin{array}{c} k\omega \\ 0 \end{array}\right] \\ &= \left[\begin{array}{cc} s + k \omega & \omega \\ -\omega & s \end{array}\right]^{-1}\left[\begin{array}{c} k\omega \\ 0 \end{array}\right] \\ &= \frac{1}{s^2+k\omega s+\omega^2}\left[\begin{array}{cc} s & -\omega \\ \omega & s + k \omega \end{array}\right]\left[\begin{array}{c} k\omega \\ 0 \end{array}\right] \\ &= \frac{1}{s^2+k\omega s+\omega^2}\left[\begin{array}{c} k\omega s \\ k\omega^2 \end{array}\right]\end{align}\tag{16}$$
(16)式から,


また,
$$\left|\frac{\hat{e_\alpha}(j\omega)}{e_\alpha(j\omega)}\right|=1\tag{17}$$$$\arg\left(\frac{\hat{e_\alpha}(j\omega)}{e_\alpha(j\omega)}\right)=0\tag{18}$$$$\left|\frac{\hat{e_\beta}(j\omega)}{e_\alpha(j\omega)}\right|=1\tag{19}$$$$\arg\left(\frac{\hat{e_\beta}(j\omega)}{e_\alpha(j\omega)}\right)=-\frac{\pi}{2}\tag{20}$$
それぞれのボード線図を描くと図9のようになります.
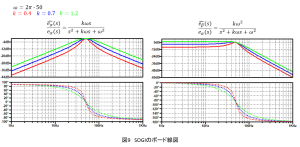
このように,電源電圧から同位相の基本波と,それと同振幅で位相が
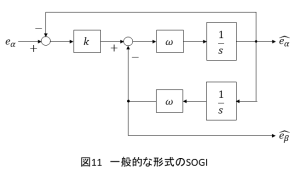
上記のように図10のオブザーバとして考えることができるSOGIですが,一般的に図11のように構成されます.それぞれは等価となります.
SOGIに対しdq変換とPLLを組み合わせ,SOGI-based PLLが構成されます.SOGIにより得られた固定座標系の電源電圧



$$\hat{\theta}=\theta^{\ast}-\Delta\theta\tag{21}$$
が目標の位相角に基づき(22)式とする場合, は(23)式となります.
は(23)式となります.
$$\begin{align}\hat{\boldsymbol{e}_{\alpha\beta}} &= E_m\left[\begin{array}{c}\cos{\theta ^{\ast}} \\ \sin{\theta ^{\ast}}\end{array}\right] \\ &= E_m\left[\begin{array}{c}\cos{(\hat{\theta}+\Delta\theta)} \\ \sin{(\hat{\theta}+\Delta\theta)}\end{array}\right] \end{align}\tag{22}$$
$$\begin{align}\hat{\boldsymbol{e}_{dq}} &=\boldsymbol{R}^T(\hat{\theta})\hat{\boldsymbol{e}_{\alpha\beta}} \\ &= E_m\left[\begin{array}{cc}\cos{\hat{\theta}} & \sin{\hat{\theta}} \\ -\sin{\hat{\theta}} & \cos{\hat{\theta}}\end{array}\right]\left[\begin{array}{c}\cos{(\hat{\theta}+\Delta\theta)} \\ \sin{(\hat{\theta}+\Delta\theta)}\end{array}\right] \\ &= E_m \left[\begin{array}{c}\cos{\Delta\theta} \\ \sin{\Delta\theta}\end{array}\right]\end{align}\tag{23}$$
したがって,(24)式により位相角の誤差である
$$\Delta\theta = \tan^{-1}\left(\frac{\hat{e_q}}{\hat{e_d}}\right)\tag{24}$$
また,
$$\Delta\theta \simeq \frac{\hat{e_q}}{\hat{e_d}}\tag{25}$$
PLLは位相角の誤差をゼロとするような制御ループです.すなわち,
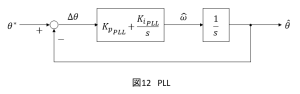
PI制御器に加え積分器を設ける理由は,位相角

ところで,
$$\frac{\hat{\theta}(s)}{\theta^{\ast}(s)}=\frac{K_{p_{PLL}}s+K_{i_{PLL}}}{s^2+K_{p_{PLL}}s+K_{i_{PLL}}}\tag{26}$$
(26)式より,二次LPFとBPFの並列結合と等価であることがわかります.すなわち,PLLの本質は単なるフィルタであるといえます.ただし微分演算を用いることなく電源の角周波数を得るためには,このフィードバック制御系のような構成のPLLが有用となります.
PI制御器のパラメータ


$$\frac{\omega_{c_{PLL}}}{5}=\frac{K_{i_{PLL}}}{K_{p_{PLL}}}\tag{27}$$
また,クロスオーバ角周波数
$$\begin{align}\left|\left(K_{p_{PLL}}+\frac{K_{i_{PLL}}}{j\omega_{c_{PLL}}}\right)\frac{1}{j\omega_{c_{PLL}}}\right|&=\frac{\sqrt{(\omega_{c_{PLL}}K_{p_{PLL}})^2+K_{i_{PLL}}^2}}{\omega_{c_{PLL}}^2} \\ &= 1\end{align}\tag{28}$$
(27)式,(28)式より,PI制御器のパラメータは(29)式,(30)式のように求められます.
$$\begin{align}K_{p_{PLL}}&=\frac{5}{\sqrt{26}}\omega_{c_{PLL}} \\ &\approx \omega_{c_{PLL}}\end{align}\tag{29}$$
$$\begin{align}K_{i_{PLL}}&= \frac{\omega_{c_{PLL}}^2}{\sqrt{26}} \\ &\approx \frac{\omega_{c_{PLL}}^2}{5}\end{align}\tag{30}$$
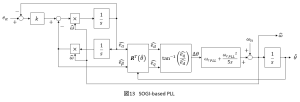
以上より,SOGI-based PLLを構成すると図13のようになります.PLLから得られる角周波数
また,位相角を無限大に増加させるような処理は実際にはできないため,PLLの積分器を
仮想軸エミュレーション
単相PWMコンバータでは,α軸電流

そこで,もう一相分のPWMコンバータの回路(プラント)を仮想的に制御系内に作り,β軸電流を得ることができる仮想軸エミュレーション(FAE)が提案されています.この方法では事実上の二相PWMコンバータと同様の構成となるため,高速な応答性が得られます.
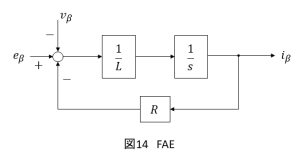
(1)式より,β軸のプラントは(31)式のようなモデルとなります.
$$e_\beta =L\frac{di_\beta}{dt}+Ri_\beta + v_\beta \tag{31}$$
(31)式をラプラス変換し,
$$i_\beta(s)=\frac{1}{Ls+R}\{e_\beta(s)-v_\beta(s)\}\tag{32}$$
はSOGI-based PLLより得られ,また は電流制御器の出力を逆dq変換して得られるものです.それらの差分を
は電流制御器の出力を逆dq変換して得られるものです.それらの差分を という一次のLPFを通してが求められるということになります.すなわち,FAEの本質は単なるフィルタであるといえます.FAEをブロック線図に表すと図14のようになります.
という一次のLPFを通してが求められるということになります.すなわち,FAEの本質は単なるフィルタであるといえます.FAEをブロック線図に表すと図14のようになります.
直流電圧制御系
PWMコンバータは有効電力成分を操作することにより,直流側の電圧を一定に制御します.dq座標系において,有効電力pは(33)式で表されます.
$$p=\frac{e_di_d}{2}\tag{33}$$
直流側は電流源と平滑コンデンサにより,図15のように簡単なモデルで表すことができます.したがって直流電圧制御系は,制御器の出力を


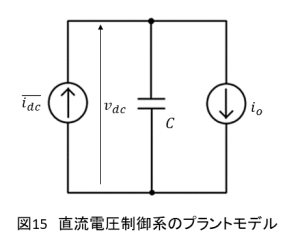
コンバータが出力する平均電流
$$p=v_{dc}\bar{i_{dc}}\tag{34}$$
(33)式,(34)式より,d軸電流の指令値と制御量が一致するとして

$$i_d^{\ast}=\frac{2v_{dc}}{e_d}\bar{i_{dc}}\tag{35}$$
制御器には,クロスオーバ周波数が10Hz程度となるように設計したアンチワインドアップ付きPI制御やType2補償器,あるいは以前の記事でも紹介したデッドビート制御などを適用します.
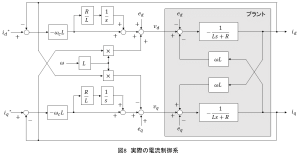
制御系の全体構成
以上より,ベクトル制御を適用した単相PWMコンバータの制御系を構成すると図16のようになります.

また,電源電圧
作例
製作した単相PWMコンバータの各パラメータの設定値を表1に示します.
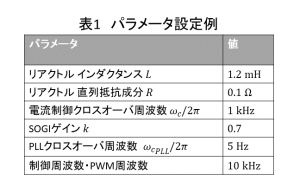
単相PWMコンバータの電源電圧センサレス仮想軸電流ベクトル制御を実装できました。
d軸電流(有効電流)により直流出力電圧を一定制御しつつ、q軸電流(無効電流)の指令値を外部から与えている様子です。 https://t.co/91274Uc9fS pic.twitter.com/mRq4p75ufK— タマゴさん (@86723nasogamat) November 13, 2022
まとめ
単相PWMコンバータにベクトル制御を適用するにあたって,その基本手法を紹介しました.ここで紹介したSOGI-based PLLやFAEなどについて国内の文献はほとんど無いため,パワエレ制御初学者を含み広く知られていただけたら幸いです.
電子工作初心者のパワエレ幼女です。マジでド素人なので記事内容はあまり参考にしないほうがいいかもしれません。

興味深い情報ありがとうございます。図6のデカップリング後の補償器C(s)にマイナスが付く理由がよくわかっていないのでご教示ください。初歩的な質問ですみません。。
プラントのモデル化に私の拘りがあって,入力電流の方向を電源からコンバータに向かうものとしてモデル化していることが発端となっています.(コンバータではなくインバータならこの反対方向としますが…)
これによりプラントの伝達関数はマイナスが付く1次系の形になりますが,補償器にもマイナスを付けて相殺することで,プラントと補償器の両者ともマイナスが無いものとして扱うことができ,フィードバック制御系としてわかりやすくなります.(図7)